Подпишитесь на наши страницы в социальных сетях, чтобы получать оперативные публикации.
В эпоху революционных технологических прорывов навигационные системы стали основополагающими элементами, способствовавшими многочисленным достижениям, особенно в критически важных с точки зрения точности областях. Путь от примитивной небесной навигации до сложных инерциальных навигационных систем (ИНС) олицетворяет собой неустанное стремление человечества к исследованиям и предельной точности. В данном анализе подробно рассматривается сложная механика ИНС, исследуются передовые технологии волоконно-оптических гироскопов (ВОГ) и ключевая роль поляризации в поддержании волоконно-оптических петель.
Часть 1: Расшифровка инерциальных навигационных систем (ИНС):
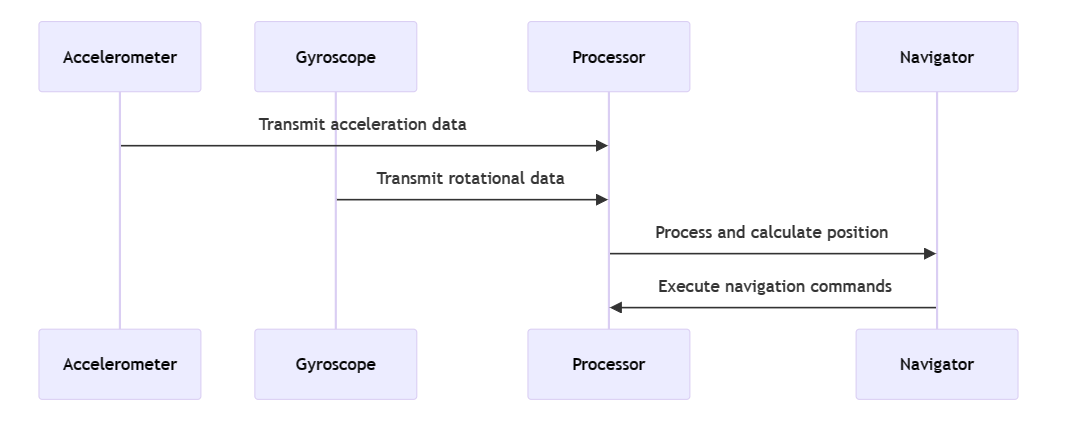
Инерциальные навигационные системы (ИНС) выделяются как автономные средства навигации, точно вычисляющие положение, ориентацию и скорость транспортного средства независимо от внешних сигналов. Эти системы объединяют датчики движения и вращения, органично интегрируясь с вычислительными моделями для определения начальной скорости, положения и ориентации.
Типичная INS включает в себя три основных компонента:
• Акселерометры: Эти важнейшие элементы регистрируют линейное ускорение транспортного средства, преобразуя движение в измеримые данные.
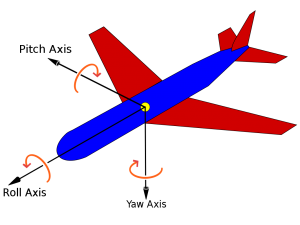
• Гироскопы: эти компоненты, являющиеся неотъемлемой частью системы определения угловой скорости, играют ключевую роль в ориентации системы.
• Компьютерный модуль: Нервный центр инерциальной навигационной системы, обрабатывающий многогранные данные для получения аналитических данных о местоположении в реальном времени.
Устойчивость инерциальной навигационной системы (ИНС) к внешним помехам делает ее незаменимой в оборонном секторе. Однако она сталкивается с проблемой «дрейфа» — постепенного снижения точности, что требует сложных решений, таких как объединение данных с датчиков для уменьшения ошибок (Чатфилд, 1997).
Часть 2. Динамика работы волоконно-оптического гироскопа:
Волоконно-оптические гироскопы (ВОГ) знаменуют собой революционную эру в области измерения вращения, используя интерференцию света. Благодаря высокой точности, ВОГ играют жизненно важную роль в стабилизации и навигации аэрокосмических аппаратов.
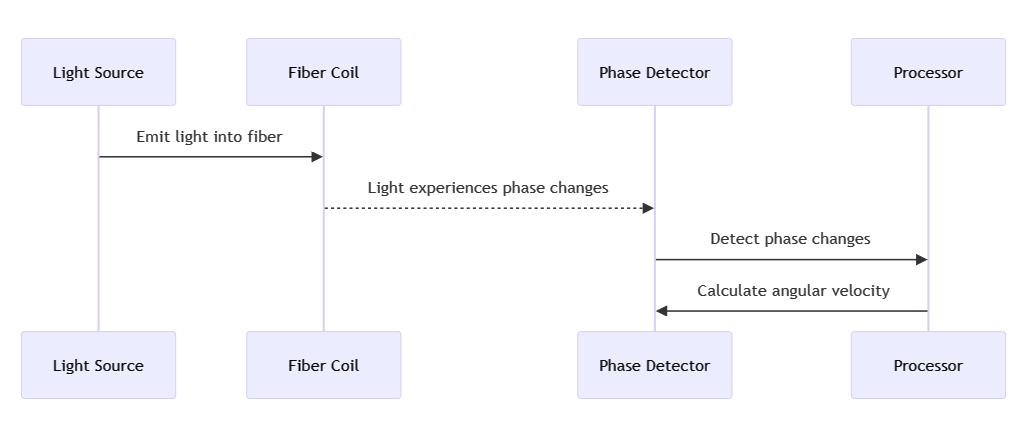
Волоконно-оптические гироскопы работают на основе эффекта Сагнака, при котором свет, распространяющийся в противоположных направлениях внутри вращающейся волоконной катушки, вызывает фазовый сдвиг, коррелирующий с изменениями скорости вращения. Этот сложный механизм позволяет получать точные показатели угловой скорости.
К основным компонентам относятся:
• Источник света: точка начала, как правило, лазер, инициирующая распространение когерентного света.
· Волоконная катушкаСпиральный оптический канал удлиняет траекторию света, тем самым усиливая эффект Сагнака.
• Фотодетектор: Этот компонент распознает сложные интерференционные картины света.
Часть 3: Значение поляризационно-сохраняющих волоконно-оптических петель:
Волокнистые петли с сохранением поляризации (PM), являющиеся неотъемлемой частью волоконно-оптических гироскопов (ВОГ), обеспечивают равномерное поляризационное состояние света, что является ключевым фактором точности интерференционной картины. Эти специализированные волокна, борясь с дисперсией поляризационных мод, повышают чувствительность ВОГ и достоверность данных (Керси, 1996).
Выбор полимерных волокон, продиктованный эксплуатационными требованиями, физическими характеристиками и системной гармонизацией, влияет на общие показатели производительности.
Часть 4: Применение и эмпирические данные:
Гидравлические гироскопы (FOG) и инерциальные навигационные системы (INS) находят применение в самых разных областях, от организации беспилотных воздушных экспедиций до обеспечения кинематографической стабильности в условиях непредсказуемой окружающей среды. Подтверждением их надежности является использование в марсоходах НАСА, обеспечивающее безотказную внеземную навигацию (Maimone, Cheng, and Matthies, 2007).
Прогнозы рынка предсказывают бурный рост ниши для этих технологий, при этом направления исследований направлены на укрепление устойчивости системы, повышение точности матриц и расширение спектра адаптивности (MarketsandMarkets, 2020).

Кольцевой лазерный гироскоп
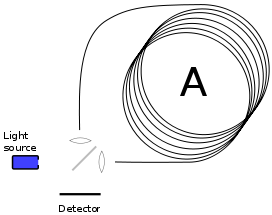
Схема волоконно-оптического гироскопа, основанного на эффекте Сагнака.
Ссылки:
- Чатфилд, Альберта, 1997.Основы высокоточной инерциальной навигации.Прогресс в астронавтике и аэронавтике, том 174. Рестон, Вирджиния: Американский институт аэронавтики и астронавтики.
- Керси, А.Д. и др., 1996. «Волоконно-оптические гироскопы: 20 лет технологического прогресса», вТруды IEEE,84(12), стр. 1830-1834.
- Маймоне, М.В., Ченг, И., и Маттис, Л., 2007. «Визуальная одометрия на марсоходах — инструмент для обеспечения точного управления и получения научных изображений».Журнал IEEE Robotics & Automation,14(2), стр. 54-62.
- MarketsandMarkets, 2020. «Рынок инерциальных навигационных систем по классам, технологиям, областям применения, компонентам и регионам — глобальный прогноз до 2025 года».
Отказ от ответственности:
- Настоящим заявляем, что некоторые изображения, размещенные на нашем веб-сайте, собраны из интернета и Википедии в целях содействия образованию и обмена информацией. Мы уважаем права интеллектуальной собственности всех первоначальных создателей. Эти изображения используются без намерения получить коммерческую выгоду.
- Если вы считаете, что какой-либо используемый контент нарушает ваши авторские права, пожалуйста, свяжитесь с нами. Мы готовы принять соответствующие меры, включая удаление изображений или указание источника, для обеспечения соблюдения законов и правил об интеллектуальной собственности. Наша цель — поддерживать платформу, богатую контентом, справедливую и уважительную к правам интеллектуальной собственности других лиц.
- Пожалуйста, свяжитесь с нами, используя указанные ниже способы связи.email: sales@lumispot.cnМы обязуемся незамедлительно принимать меры после получения любого уведомления и гарантируем 100% сотрудничество в решении любых подобных проблем.
Дата публикации: 18 октября 2023 г.